Dyfraktometry serii DRON, HZG, URD stanowią wyposażenie wielu laboratoriów. O ile jakość samych goniometrów bywa znakomita, to elektronika charakteryzuje się małą niezawodnością, wielkimi gabarytami i zużyciem energii, niewygodą obsługi i nieefektywnymi nośnikami, na które zapisywane są dane pomiarowe.Aparaty pozostałych firm, choć reprezentują o wiele wyższy poziom techniczny, także pod względem elektronicznym są przestarzałe. Brakuje lamp elektronowych, oryginalnego papieru do rejestratorów Y(t) i cierpliwości, by mierzyć linijką wysokości i odległości pików...

Można oczywiście kupić urządzenie nowe. Pojawiają się przy tym jednakże dwa problemy :
Rasowy eksperymentator woli urządzenie stare, gdzie zna każdą śrubkę, gdzie może wszystko pokręcići poustawiać tak, by wykonać niekonwencjonalny pomiar, o jakim się inżynierom w fabryce nie śniło.


System instalowany jest w kasecie CAMAC i składa się z następujących bloków :
Tor detekcji :
Do prostych pomiarów dyfrakcyjnych, gdy kąt Theta = 1/2 kąta 2Theta używany jest Dronek-3.
Użytkownik otrzymuje program na komputer sterujący IBM PC, który umożliwia przesyłanie komend i parametrów sterujących pomiarem, odbiór danych, zobrazowanie ich wykresem z podaniem parametrów statystycznych, zapis na dysk w formacie tekstowym łatwym do użycia w innych programach, oraz wstępną analizę graficzną :
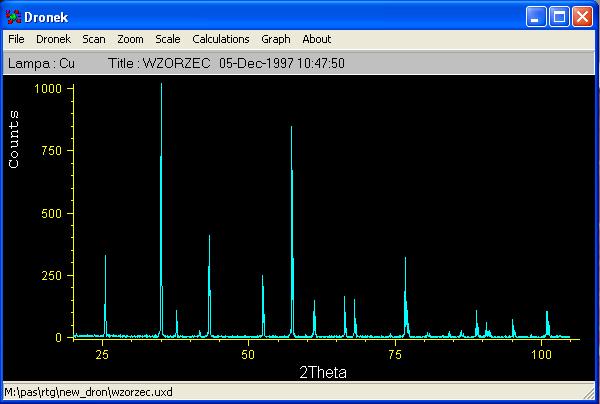
Prócz tego program współpracuje z drukarką systemową tworząc eleganckie wykresy, skalowane i obracane stosownie do wymagań użytkownika. Obrazy te można także zapisać do pliku w formacie GIF, JPG, BMP i umieścić w publikacji.
Przy bardziej skomplikowanych zadaniach ( oddzielne sterowanie osiami Theta i 2Theta, pomiary tekstur na 4 osiach, liczniki pozycyjne, itp. ) stosujemy kartę KAIO-48.
Ponieważ karta KAIO-48 jest już przestarzała technicznie ( magistrala ISA ) wycofujemy się z jej użycia
na rzecz niezależnych sterowników Dronek-3 i Dronek-4, przeprogramowanych na potrzeby pomiarów skomplikowanych.
Oprogramowanie sterujące pomiarami napisane jest w sposób otwarty, tzn. użytkownik może zaprogramować własny algorytm pomiarowy w specjalnym języku programowania eksperymentu , wzorowanym na urządzeniach firmy PHILIPS.
To podejście gwarantuje, że metodyka pomiaru będzie rozwijać się razem z eksperymentatorem bez potrzebywydawania wciąż nowych pieniędzy na kolejne wersje programu sterującego.

Na ekranie komputera obserwuje się na bieżąco rysowany wykres intensywności promieniowania w funkcji położenia goniometru albo wyświetla tabelę z wartościami cyfrowymi.
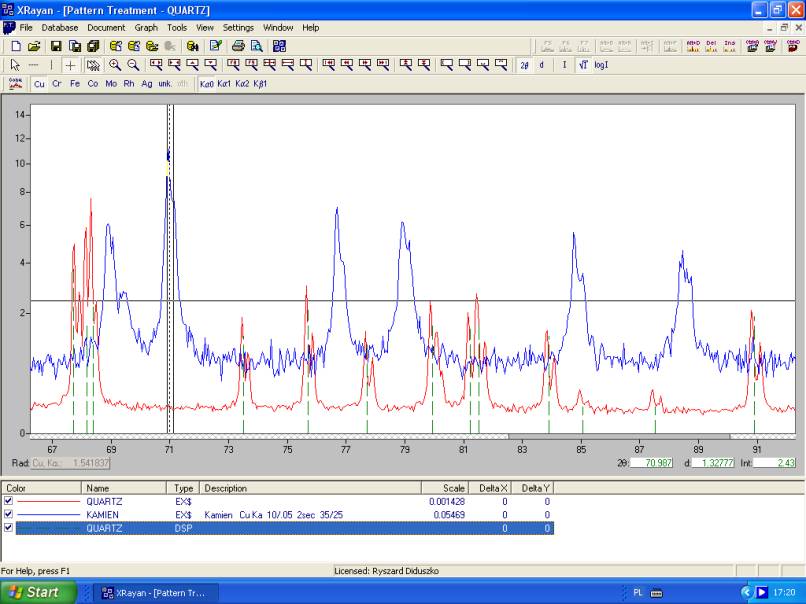
Zebrane dane zapisywane są do plików dyskowych w formacie ASCII, co pozwala naich późniejszy odczyt i interpretację przez programy innych, niezależnych producentów, np.bazy danych rentgenowskich ( XRAYAN, DHN/PDS ), arkusze kalkulacyjne (Excell), programy rysujące (Sigma Plot), itp.

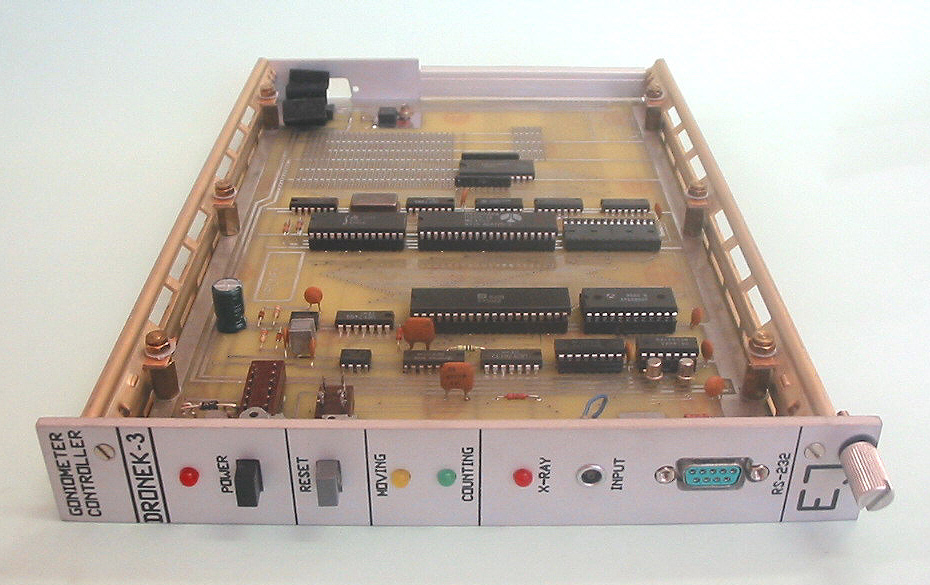
Blok zliczająco - sterujący DRONEK-3 przeznaczony jest do pracy w laboratoriach rentgenowskich wyposażonych w dyfraktometry DRON-1, DRON-2, DRON-3, DRON-4 produkcji ZSRR lub HZG-1, HZG-3, HZG-4, URD-6 produkcji NRD, bądź też dyfraktometry innych producentów.
Przychodzące z toru detekcji impulsy RTG zliczane są w 20-bitowym liczniku i zapamiętywane w wewnętrznej pamięci danych o pojemności do 10752 punktów pomiarowych.DRONEK-3 na żądanie przesyła wyniku pomiaru do nadrzędnego komputera IBM PC poprzez łącze szeregowe RS-232. Użytkownik może obejrzeć zebrane dane w formie wykresu i przeprowadzić wstępną analizę graficzną przy pomocy ruchomych markerów przesuwanych po wykresie ( położenia pików, ich amplitudy etc.)
2. Dane techniczne
Kontroler DRONEK-3 zbudowany został w oparciu o 8-bitowy mikroprocesor MC 6502, statyczną pamięć danych 65256 i wielofunkcyjny układ wejścia/wyjścia 6522. Program działania urządzenia umieszczony w pamięci stałej EPROM 2764 zawiera procedury umożliwiające przy użyciu klawiatury i ekranu komputera sterującego komunikację z operatorem przez łącze szeregowe, rozpoznawanie i wykonywanie poleceń zadawanych w postaci ciągów znaków ASCII, tj.:
Urządzenie zainstalowane zostało w module CAMAC podwójnej szerokości. Poprzez złącze grzebieniowe z kasety CAMAC pobierane są napięcia zasilające oraz przesyłane są sygnały sterujące do interfejsu DRONOGUR zawierającego wysokoprądowe układy napędzania silnika goniometru.
Na przedniej ściance modułu znajduje się gniado LEMO, do którego doprowadza się impulsy z analogowego toru detekcji oraz gniazdo CANNON - port szeregowy RS-232.
Dla wygody użytkownika 3 diody świecące pokazują przebieg pomiaru :
Przycisk RESET pozwala na awaryjne zatrzymanie pomiaru bez konieczności uruchamiania komputera sterującego, a także na przywrócenie łączności z DRONKIEM w razie zakłóceń transmisji danych.
3.2 Układ zerowania systemu
Zadaniem tego układu jest wygenerowanie sygnału RESET dla mikroprocesora w momencie włączenia zasilania i po każdym naciśnięciu klawisza RESET na przedniej ściance przyrządu.Zbudowany został z układu scalonego NE555 (U4) i inwertera 7404 (U8C). Długość impulsu zerującego określa stała czasowa R2C2 - około 2 sekundy.
3.3 Generator zegarowy
Dostarcza on przebiegu F0 = 1MHz o wypełnieniu 50% do taktowania mikroprocesora i przebiegu TxClk/RxClk = 9600 Hz do taktowania portu szeregowego 6850. Źródłem sygnału jest rezonator kwarcowy 8 MHz.
3.4 Licznik czasu
Licznik czasu zrealizowany został w sposób sprzętowo - programowy z wykorzystaniem wielofunkcyjnego układu 6522. Znajdujący się w układzie licznik T1 odmierza odcinki 1/20 sekundy generując przerwania niemaskowalne. Program obsługi otwiera bramkę cyfrową dopuszczając impulsy z toru detekcji do licznika impulsów, sumuje odcinki 1/20 s, aż osiągną zadaną długość czasu, a następnie zamyka bramkę, odczytuje licznik impulsów, zapamiętuje go i uruchamia przesuw goniometru do następnego punktu pomiarowego.
3.5 Licznik impulsów badanych
Impulsy z toru detekcji doprowadzane są do 4-bitowego licznika binarnego 7493 (U18), a dalej do 16-bitowego licznika T2 w układzie 6522. Utworzony jest zatem licznik 20-bitowy o pojemności 1048575 impulsów - wystarczajacy dla wszystkich typowych pomiarów rentgenowskich.
Impulsy z gniazda LEMO przechodzą przez regenerujące sygnał TTL bramki z przerzutnikami Schmitta i pobudzają także multiwibrator monostabilny 74123. Steruje on czerwoną diodą świecącą, która błyska przy każdym impulsie. Dzięki efektowi regeneracji występującemu w tym typie przerzutników dioda zapala się na stałe przy wielkiej częstości impulsów.
3.6 Sterowanie goniometrem
Sterownik goniometru montowany jest w oddzielnym module CAMAC. Zawiera on wysokonapięciowe obwody do zasilania silnika goniometru. Komunikacja ze sterownikiem DRONOGUR odbywa się poprzez część linii magistrali CAMAC wg. standardu prywatnego.
Załączone schematy pozwalają łatwo zorientować się w zasadach pracy.
3.7 Komunikacja z komputerem nadrzędnym
Komunikacja z komputerem nadrzędnym wykonuje się za pomocą łącza szeregowego RS-232. W jego skład wchodzą : układ scalony 6850, nadajnik linii SN 75150 i odbiornik linii SN 75154.
Kontroler DRONEK-3 wykorzystuje 6 linii : TxD, RxD, CTS, RTS, DSR, DTR.Do linii DTR doprowadzone jest na stałe przez opornik 1.6 k napięcie +12V ( sygnał gotowości kontrolera do współpracy ).Podczas przesyłania komend DRONEK-3 wymusza na linii RTS stan +12V. W takim też stanie muszą znajdować się jego wejściowe linie CTS i DSR ( odpowiada za to komputer nadrzędny ).
Transmisja danych z prędkością 9600 baudów wymaga przesyłania z potwierdzeniem, tzn. nadajnik czeka z wysłaniem następnego bajtu tak długo, aż odbiornik potwierdzi, że jest gotów do przyjęcia go.
| NADAJNIK | ODBIORNIK |
|---|---|
| | Ustaw RTS =1 i DTR =1 |
| Czekaj, aż CTS=1 i DSR =1 | |
| Wyślij bajt danych | |
| | Odbierz bajt danych |
| | Ustaw RTS=0 |
| Czekaj, aż CTS=0 | |
| Ustaw RTS=0 | |
| | Czekaj, aż CTS=0 |
Użytkowanie kontrolera DRONEK-3 jest bardzo proste. Zastosowanie się do wymienionych tutaj wskazówek umożliwi długotrwałą i niezawodną pracę urządzenia.
DRONEK-3 przeznaczony jest do pracy w warunkach laboratoryjnych. Instaluje się go w kasecie CAMAC na dowolnym stanowisku w zakresie 1-22. Po dołączeniu urządzeń współpracujących i włączeniu zasilania jest od razu gotowy do pracy. Nie jest wymagane wygrzewanie wstępne, ani klimatyzacja. Zawartość pamięci danych przyjmuje wartości przypadkowe. Gromadzenie danych jest wstrzymane.
4.1 Podłączenie urządzeń współpracujących
Kabel łącza RS-232 wolno przełączać tylko przy wyłączonym zasilaniu komputera i kontrolera. Długość kabla może dochodzić do 150 metrów
Masa kasety CAMAC musi być zwarta z masą komputera grubym drutem miedzianym ! Zlikwiduje to wpływ prądów błądzących i zapobiegnie uszkodzeniu łączy szeregowych.
| 9 pin | DRONEK-3 | Kierunek transmisji | IBM PC | 25 pin | 9 pin |
|---|---|---|---|---|---|
| 5 | GND | <-----> | GND | 7 | 5 |
| 3 | TxD | ------> | RxD | 3 | 2 |
| 2 | RxD | <------ | TxD | 2 | 3 |
| 7 | RST | ------> | CTS | 5 | 8 |
| 8 | CTS | <------ | RTS | 4 | 7 |
| 4 | DTR | ------> | DCD | 6 | 6 |
| 6 | DCD | <------ | DTR | 20 | 4 |
Do obsługi kontrolera DRONEK-3 przez komputer nadrzędny IBM PC napisany został w języku Delphi 7 program "Dronek".
Znaki pisane na klawiaturze wysyłane są łączem szeregowym do kontrolera. Na ekranie komputera wypisywane są znaki odbierane od DRONKA.
W górnej części ekranu znajduje się menu z komendami dla łatwiejszego ich wysyłania do kontrolera - nie trzeba wpisywać ich ręcznie, wystarczy kliknąć myszką w żądaną komendę lub użyć skrótu klawiszowego ALT + podkreślona litera.
Użytkownik może włączyć automatyczny odczyt danych z Dronka komendą Write i zapis ich na dysk do pliku RTG.
Czynności te odbywają się co zadaną ilość sekund. Dzięki temu zmniejsza się ryzyko utraty wszystkich danych na skutek awarii zasilania.
Dane zgromadzone w pamięci komputera IBM PC zapisywane są na dysk do pliku o podanej przez operatora nazwie, mogącej zawierać pełną ścieżkę dostępu, czyli symbol napędu dyskowego i nazwy katalogów.Operator jest też pytany o Tytuł Pomiaru - jest to ciąg dowolnych znaków zapisywany jako pierwsza linia w pliku. W szczególności można tu podać nazwę próbki, datę wykonania pomiaru, etc.Jeśli na ekranie wyświetlany jest fragment widma ( patrz dalej - menu : Zoom ), to tylko ten fragment będzie zapisany do pliku. Pozwala to wyciąć interesujące szczegóły z długiego pomiaru.
Dane zapisywane są w tzw. formacie Nowy Dronek :
(Dy0.5Y0.5)Mn2 #1 29.03.91
Lampa Co
184 'Number of Data
32.000 8240
32.010 8253
32.020 8267
32.030 8163 etykieta1
32.040 8299
32.050 8166
32.060 8208 etykieta2
Dane zapisane w pliku dyskowym są wczytywane do pamięci komputera. Nazwa pliku podana przez operatora może zawierać pełną ścieżkę dostępu, czyli symbol napędu dyskowego i nazwy katalogów. Program automatycznie rozróżnia kilka popularnych w Polsce formatów zapisu danych rentgenowskich, tj.:
Na wykresie pojawia się marker ( cienka, czerwona linia ), który może być przesuwany w lewo i w prawo co jeden kanał klawiszami kursorowymi <- i ->, PgUp, PgDn, Home, End. Naciskając jednocześnie
klawisz CTRL zwiększa się każdorazowy skok markera. W utworzonym okienku wyświetlany jest numer punktu
wskazywanego przez marker, liczba zliczeń w punkcie, kąt 2Theta i odległość międzypłaszczyznowa d.
Wciskając klawisz Enter można wprowadzić na wykres etykietę opisującą miejsce wskazywane w danej chwili przez marker. Domyślnym tekstem etykiety jest wartość d. Jest to przydatne do zaznaczania i opisywania pików na wykresie.
Przeglądanie kończy się po naciśnięciu ESC.
Za pomocą trzech markerów ( 2 pionowe i 1 poziomy ) użytkownik wybiera fragment widma, które chce rozciągnąć na cały ekran. Markery przesuwa się podobnie jak w opcji Scan,
Drugie podmenu przywraca wyświetlanie całego widma.
Uruchamia się prosty edytor tekstu automatycznie wczytujący aktualnie używany plik danych.
Można przeglądnąć te dane, ewentualnie zmienić niektóre wartości i zapisać poprawiony plik na dysk. Po zakończeniu pracy edytora poprawione dane wczytają się automatycznie do programu Dronek i będą wyświetlane
w formie wykresu.
Skala logarytmiczna pozwala lepiej zobrazować małe piki na tle dużych pików. Jej włączenie jest szybsze,
niż staranne odcinanie wielkich pików metodą Zoom -> Sector, jednakże deformuje ona kształt widma.
Odcięcie tła na wykresie pozwala rozciągnąć piki na całą, dostępną wysokość ekranu. Lepiej je wtedy widać.
Czasem jednak eksperymentator chce oszacować wielkość tła w stosunku do wielkości pików i wtedy może wybrać rysowanie
widma z tłem nieodciętym.
Widmo o słabej statystyce pomiarowej jest postrzępione, piki giną w szumach. Lekarstwem jest wygładzenie widma przez uśrednienie liczby zliczeń
w danym punkcie na podstawie liczby zliczeń w punktach sąsiednich. Można to zrobić kilkakrotnie, zdając sobie jednakże sprawę, że zafałszowaniu ulega
kształt pików i ich powierzchnia.
Dlatego zawsze można powrócić do danych oryginalnych opcją Undo
Dwoma pionowymi markerami zaznacza się granice piku i wciska guzik Integ. Powierzchnia piku zostaje policzona metodą trapezów. W okienku wyświetlone zostają dwie wartości :
Wykres widma obecny na ekranie przenoszony jest na drukarkę systemową. Możliwe jest :